Automatyka budynkowa – BMS

Nowoczesne systemy automatyki integrują instalacje elektryczne stosowane w domach. Jako główną zaletę takich rozwiązań wymienia się przede wszystkim oszczędności energii. Z tego powodu systemy inteligentnego budynku są coraz częściej wykorzystywane nie tylko w nowoczesnych domach, lecz także w obiektach handlowych i przemysłowych.
Dzięki systemom automatyki budynkowej BMS (ang. Building Management System) największe korzyści zyskuje się poprzez odpowiednie sterowanie ogrzewaniem i klimatyzacją w budynku. Chodzi tutaj o podział domu na strefy grzewcze. W każdej z nich temperatura sterowana jest oddzielnie. W pomieszczeniach, w których użytkownicy nie przebywają, system w sposób automatyczny obniży temperaturę o kilka stopni Celsjusza. Praktycy szacują, że w typowej instalacji grzewczej straty energii w dużej mierze wynikają ze zbędnego ogrzewania pomieszczeń. Przykładowo, obniżenie temperatury grzania o 1 ºC zapewni oszczędności w ogrzewaniu wynoszące 6–10%. W odniesieniu do klimatyzacji oszczędności energii mogą być jeszcze większe.
Integracja systemów
Za podstawową funkcję inteligentnego budynku uznaje się integrowanie systemów z obszarów, które są monitorowane. W zależności od funkcjonalności oraz przeznaczenia systemu integrowaniu podlega wiele aspektów funkcjonowania budynku, takich jak: 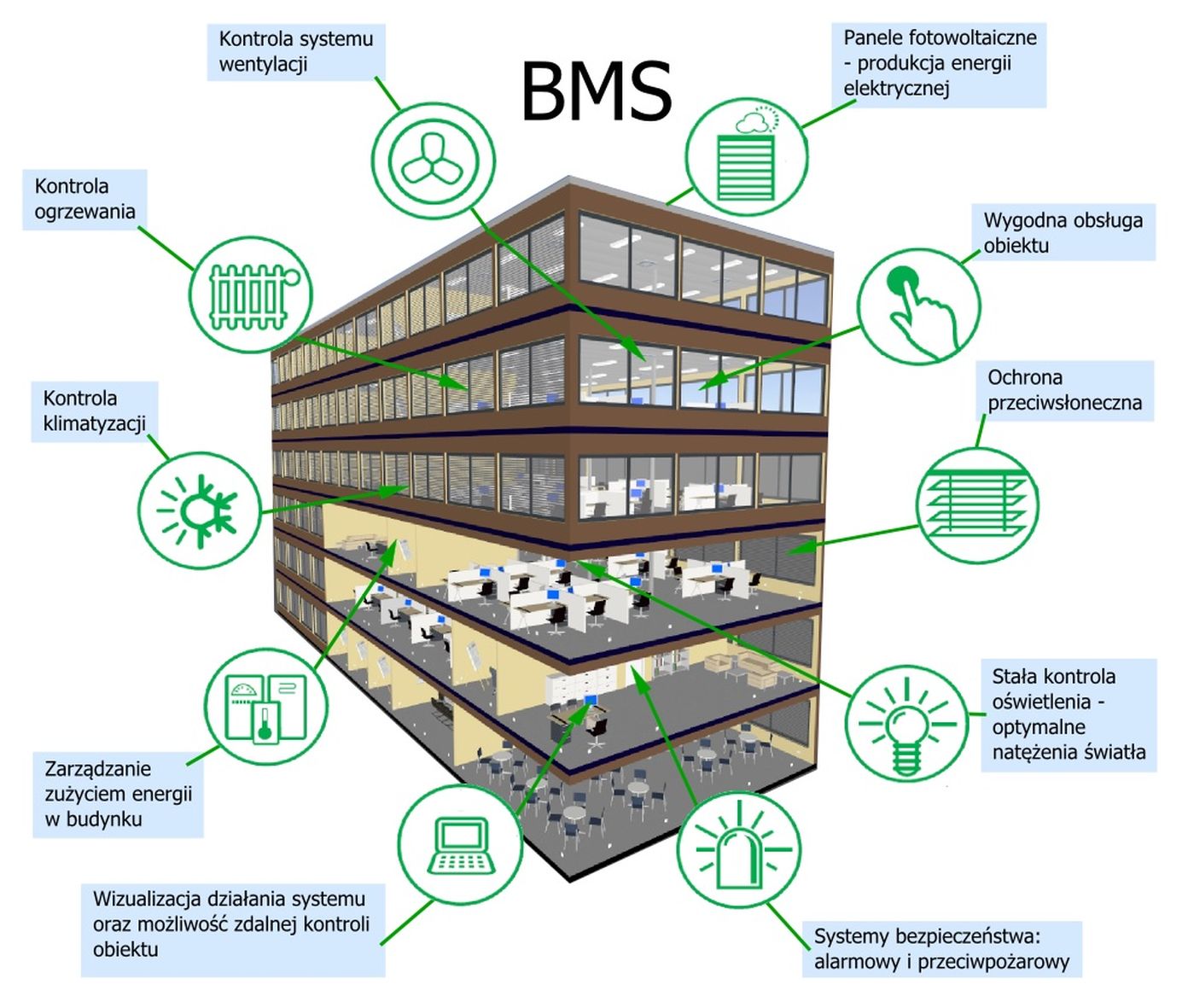 system sterowania oddymianiem pożarowym, sterowanie i monitorowanie klap przeciwpożarowych, system kontroli dostępu, system pogodowy, urządzenia audio-wizualne, a także ochrona przeciwpożarowa oraz sterowanie wentylacją, klimatyzacją i filtracją w oparciu o parametry jakości powietrza, tj. zawartość dwutlenku węgla i wilgotność. Systemy BMS mogą integrować również system zasilania UPS, sterowanie ogrzewaniem, sieć teleinformatyczną, a także sterowanie oświetleniem wewnętrznym i zewnętrznym w zależności od stanu obecności osób w pomieszczeniach oraz ruchu, w oparciu o natężenie światła itp. Ponadto integrowane są systemy monitoringu oraz alarmowania, symulacja obecności, a także instalacje elektryczne, w zakresie zasilania tablic piętrowych, szaf AKPiA i serwerowych, zasilania wind itp.
system sterowania oddymianiem pożarowym, sterowanie i monitorowanie klap przeciwpożarowych, system kontroli dostępu, system pogodowy, urządzenia audio-wizualne, a także ochrona przeciwpożarowa oraz sterowanie wentylacją, klimatyzacją i filtracją w oparciu o parametry jakości powietrza, tj. zawartość dwutlenku węgla i wilgotność. Systemy BMS mogą integrować również system zasilania UPS, sterowanie ogrzewaniem, sieć teleinformatyczną, a także sterowanie oświetleniem wewnętrznym i zewnętrznym w zależności od stanu obecności osób w pomieszczeniach oraz ruchu, w oparciu o natężenie światła itp. Ponadto integrowane są systemy monitoringu oraz alarmowania, symulacja obecności, a także instalacje elektryczne, w zakresie zasilania tablic piętrowych, szaf AKPiA i serwerowych, zasilania wind itp.
[…]
Pełna wersja artykułu w czasopiśmie Ei 2/2018 oraz na portalu http://wirtualna-czytelnia.sigma-not.pl/wirtualna/start.xhtml